pid是什么意思?PID调节到底是什么?
pid是什么意思(PID调节到底是什么?)常常看到有关PID的问题,但看来看去都看不懂他们在说什么。可能还有一些技术员一提起PID调节就摇头,搞不来呀,不是很懂啊!那么PID调节的实质是什么?通俗的概念是什么?我们通过下图分析分析。

一个自动控制系统可以很好地完成任务,首先得工作稳定,同时还必须满足调节过程的质量指标要求。即:系统的响应快慢、稳定性、更大偏差等。很明显,自动控制系统希望在稳定工作状态下,具有较高的控制质量,而我们则希望持续时间短、超调量小、摆动次数少。为了保证系统的精度,就要求系统有很高的放大系数,然而放大系数一高,又会造成系统不稳定,甚至系统产生振荡。反之,只考虑调节过程的稳定性,又无法满足精度要求。因此,在调节过程中,系统稳定性与精度之间产生了矛盾。
如何解决这个矛盾?可以根据控制系统设计要求和实际情况,在控制系统中插入“校正 *** ”,矛盾就可以得到较好解决。这种“校正 *** ”,有很多 *** 完成,其中就有PID *** 。
简单的讲,PID“校正 *** ”是由比例积分PI和比例微分PD"元件组"成的。为了说明问题,这里简单介绍一下比例积分PI和比例微分PD。
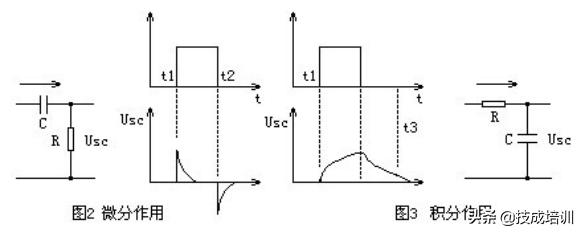
微分:从电学原理我们知道当脉冲信号通过RC电路时(图2),电容两端电压不能突变,电流超前电压90°,输入电压通过电阻R向电容充电,电流在t1时刻瞬间达到更大值,电阻两端电压Usc此刻也达到更大值。随着电容两端电压不断升高,充电电流逐渐减小,电阻两端电压Usc也逐渐降低,最后为0,形成一个锯齿波电压。这种电路称为微分电路,由于它对阶跃输入信号前沿“反应”激烈,其性质有加速作用。
积分:当脉冲信号出现时(图3),通过电阻R向电容充电,电容两端电压不能突变,电流在t1时刻瞬间达到更大值,电阻两端电压此刻也达到更大值。电容两端电压Usc随着时间t不断升高,充电电流逐渐减小,最后为0,电容两端电压Usc也达到更大值,形成一个对数曲线。这种电路称为积分电路,由于它对阶跃输入信号前沿“反应”迟缓,其性质是“阻尼”缓冲作用。
当插入校正 *** 时:
我们首先讨论自动控制系统引入比例积分PI的情况(图4)。曲线PI(1)对阶跃信号的响应特性曲线,当t=0时,PI的输出电压很小,当t>0时(由比例系数决定),输出电压按积分特性线性上升,系统放大系数Ue线性增大。就是说,当系统输入端出现大的误差时,控制输出电压不会立即变得很大,而是随着时间的推移和系统误差不断地减小,PI的输出电压不断增加,即系统放大系数Ue不断线性增大。我们称这种特性为系统阻尼;决定阻尼系数因素是PI比例系数和积分时间常数。要不断提高控制系统的质量,就要不断改变PI比例系数和积分时间常数。

再讨论控制系统引入比例微分PD的情况(图4)。曲线PD(2)对输入信号的响应特性曲线,当t=0时,PD使系统放大系数Ue骤增。就是说,当系统输入端出现误差时,控制输出电压会立即变大。我们称这种特性为加速作用。可以看出,过强的微分信号会使控制系统不稳定。所以在使用中,必须认真调节PD比例系数和微分时间常数。
为妥善解决系统稳定性与精度之间的矛盾,往往将比例积分PI与比例微分PD组合使用,形成“校正 *** ”,也称PID调节。PID调节特性曲线PID(3)(图4),是PI、PD特性曲线合成的。适当的调节PI、PD上述各系数,就能保证控制系统即快又稳的工作。
相关文章

什么是抑郁症?抑郁症到底是什么?为什么好多人自杀?
现代人各种各样的心理问题越来越突出了,尤其是抑郁症,发病率越来越高,这跟我们日常生活中的精神和压力太大,都有很大的关系,说起抑郁症,其实发病原因是十分复杂的,那么今天小编就来给大家说说究竟抑郁症到底是...
什么是核能?核能到底是什么
什么是核能(核能到底是什么)通俗的讲,核能是发生核反应时放出的能量,正如烧煤,天然气燃烧等现象,核燃料“燃烧”时同样会放出放出能量,我们看到的宏观表象,就是燃烧时放出能量并随着产热。从微观角度来看,煤...

羊蝎子到底是什么?为什么那么多人喜欢吃?看完涨知识了
年轻人都很爱吃烧烤,7、8个人围在一桌喝着冰啤酒,撸着烤串,再来点羊蝎子火锅,真的特别的舒坦。很多人都爱吃这个羊蝎子火锅,那么你们知道这个羊蝎子究竟是什么吗?为什么味道那么好吃?今天我们就来一起了解下...
何嘉莉黄家驹到底是什么关系?揭秘绯闻女友的
何嘉莉是出生于香港的女演员、歌手,活跃在1996年到2010年的香港娱乐圈。但是2002年之后何嘉莉就淡出了人们的视线。2006年的时候,何嘉莉嫁给了甜品大王黄逸璋。本来何嘉莉和黄家驹是没有什么关系的...

股权激励什么意思,股权激励是不是利好
近几年,类似期权、原始股这类的词,我们时常听到,也知道这基本上说的是公司承诺给员工的东西,算是福利之一,但又好像跟别的福利不大一样,因为涉及到某些前提条件和限制。 估计有许多公司...

什么叫气溶胶传播?气溶胶传播到底是什么
什么叫气溶胶传播(气溶胶传播到底是什么)这两天有自媒体发文表示新冠病毒可以通过气溶胶传播,而且将气溶胶描述得像鬼一样神奇——“这种气溶胶在人多的时候是看不见的“迷雾”,人少的时候则是看不见的“团雾”,...
Copyright Your WebSite.Some Rights Reserved.
 免责声明:本站所发布的任何网站,全部来源于互联网,版权争议与本站无关。仅供技术交流,如有侵权或不合适,请联系本人进行删除。不允许做任何非法用途!
免责声明:本站所发布的任何网站,全部来源于互联网,版权争议与本站无关。仅供技术交流,如有侵权或不合适,请联系本人进行删除。不允许做任何非法用途!